

 联系我们
联系我们

所以,以下是对安川机器人的规格表内容进行详细说明,以下是规格表的一个案例用以参考使用。
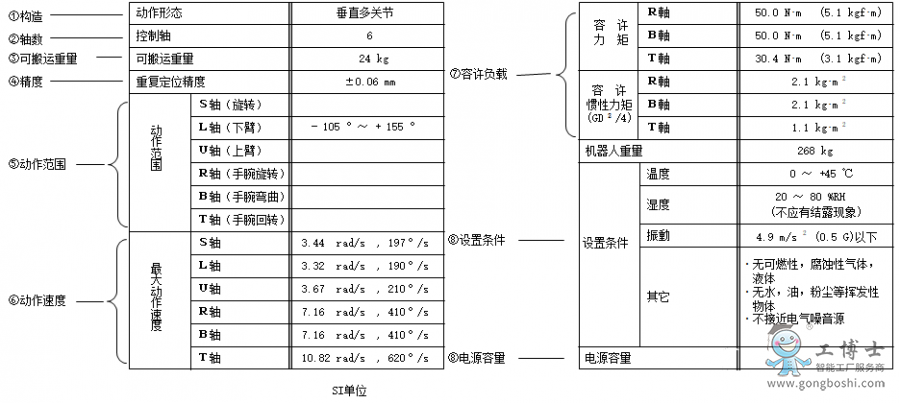
①安川机器人从构造上来讲可以分为以下两类:
垂直多关节型---被安川称为 MH/MA/MS/GP/AR/SP型
水平多关节型---被安川称为 液晶、半导体基板搬运系列
②规格表记载了机器人所有的轴数(或者说是自由度)
一般来讲通用机器人是6轴,但是限定用途的机器人也有2~7轴的,甚至有15轴双臂机器人。

③可搬运重量
表示机械臂可拿起的大重量(严格的说是手腕法兰盘前端部分),例如GP25的法兰盘部***大能负载25kg,这里的重量指的是【工件+机械手的重量】,事实上仅拿起25kg的工件是不可能的。
GP50以上的大型机种(其他公司也是同样做法),手腕先端部附近设有螺纹底座,可以在这部分安装处理用来配线、配管的中转箱等,像这样的情况,中转箱的重量也含在可搬运重量内。换句话说,GP50的螺纹座部分被装上了5kg的中转箱时,先端部就只有45kg了。

另外,即使荷重在目录的规格以内(GP50的情况:50kg)时,也不能保证机械臂可以负担此荷重。像后述中所说到的,必须要考虑到手腕轴部分工件产生的力矩与转动惯量对机器人带来的影响。如果忽略这两个因素,机器人在使用时容易产生抖动以及速度偏低等情况,并且不利于电机寿命!!!
PS:如果需要计算负载是否满足选型要求,可以联系小编吆(计算表格/计算软件)。
了解更多安川机器人